
O Protótipo / Construção do Protótipo
Foram feitas pesquisas de informação e reuniões com técnicos de saúde da área da neurologia, terapia ocupacional, engenheiros biomédicos, professores e psicólogos, com o objetivo de perceber a pertinência e a viabilidade do protótipo a desenvolver.
Depois dos objetivos definidos, foram elaborados os projetos e reunidos os materiais a utilizar no desenvolvimento do protótipo.

Início da construção
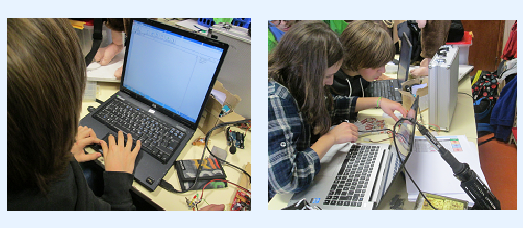
O grupo de trabalho foi dividido em duas equipas com tarefas específicas a executar. Enquanto uma das equipas desenvolveu a parte mecânica, a outra trabalhou a parte eletrónica. Reunimos periodicamente para avaliação e articulação do trabalho.
Para a elaboração do movimento do dedo mecânico, que utiliza o microcontrolador Picaxe, foi necessário a construção de um circuito impresso recorrendo à utilização do programa "PCP Artist".
Para a construção da parte mecânica, foram reaproveitados materiais, como por exemplo scanners de computadores, impressoras desatualizadas, pedaços de alumínios, provenientes de empresas que fabricam caixilhos para janelas, etc
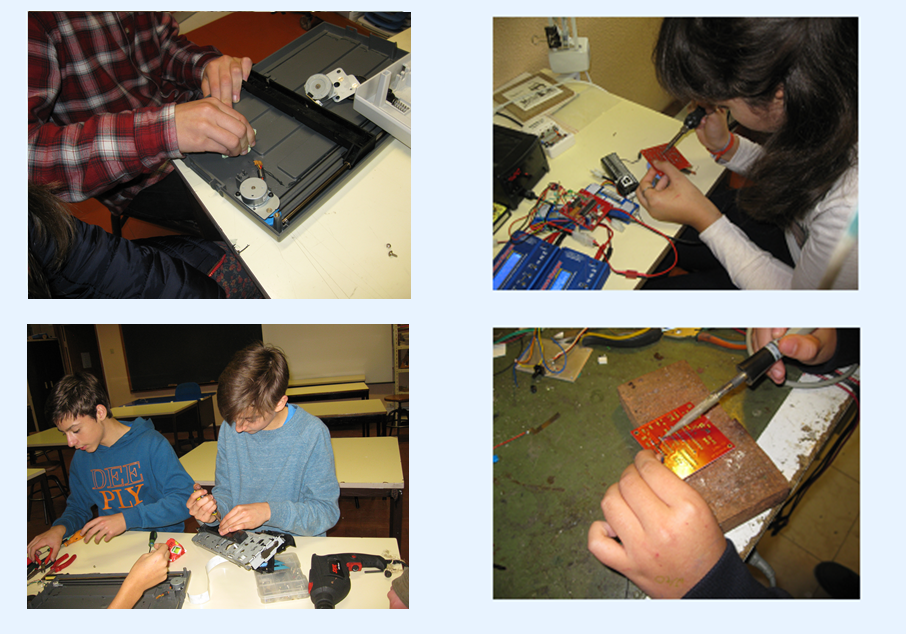
Cortaram-se as peças de alumínio que juntamente com pedaços de scanners, começaram a dar forma ao protótipo pretendido.

Montagem da placa do microcontrolador, para o movimento dos motores, assim como os sensores a utilizar nas diferentes patologias.
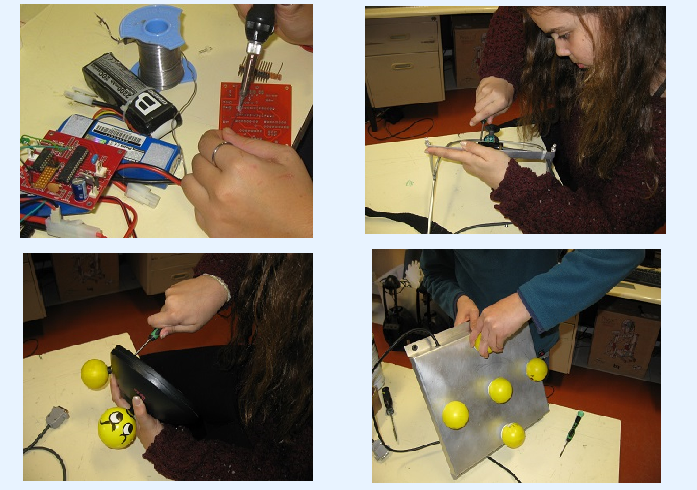
No protótipo utilizou-se o programa "Picaxe Editor" para programar o microcontrolador Picaxe. O sensor colocado na cabeça/queixo do paciente, nos joysticks adptados para a mão dos pacientes, permite captar os movimentos do queixo ou da mão traduzindo-os em sinais a enviar ao microcontrolador. O microcontrolador, por sua vez, traduz esses sinais em impulsos elétricos, enviando-os para os motores que movimenta o dedo mecânico.


